Aperçu des sections
- Généralités
- Activité 1
Activité 1
Consignes :
- Lancer TinkerCad grâce au lien de votre classe
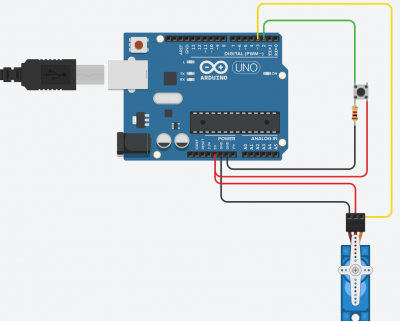
- Dans "Circuit" recopier le schéma de câblage fourni avec un servomoteur
- Dans la partie "Code" construire le programme permettant le mouvement du moteur à l'aide des blocs de la seconde image
- Lancer Draw IO Editor puis ouvrir le diagramme des Cas d'utilisation, enfin compléter le diagramme


Activité 25 dans le cahier
Page 73 et 74
- Activité 2
Activité 2
Consignes :
- Câbler la maquette du doigt articulé en suivant le schéma de l'activité 1
- Lancer TinkerCad grâce au lien de votre classe et retrouver votre simulation
- Lire le tutoriel Arduino afin d'envoyer votre code vers la maquette
- Tester votre simulation en téléversant le code

Activité 34 dans le cahier
Page 95 et 96
- Activité 3
Activité 3
Consignes :
- Lancer TinkerCad grâce au lien de votre classe
- Dans "Circuit" ouvrer le schéma de câblage de la séance précédente
- Dans la partie "Code" modifier le programme permettant le mouvement du doigt progressivement sur trois positions (0° - 30° - 50° - 80°) dans les deux sens.

Activité 32 dans le cahier
Page 91 et 92


